Відмінності між версіями «Датчики мехатронних систем. Класифікація і характеристики»
9074425 (обговорення • внесок) |
9074425 (обговорення • внесок) |
||
| Рядок 340: | Рядок 340: | ||
---- | ---- | ||
== Глосарій == | == Глосарій == | ||
| − | '''Датчик''' – це пристрій, що сприймає зовнішні впливи і реагує на них зміною електричних сигналів. | + | '''Датчик''' – це пристрій, що сприймає зовнішні впливи і реагує на них зміною електричних сигналів[https://uk.wikipedia.org/wiki/%D0%95%D0%BB%D0%B5%D0%BA%D1%82%D1%80%D0%B8%D1%87%D0%BD%D0%B8%D0%B9_%D1%81%D0%B8%D0%B3%D0%BD%D0%B0%D0%BB#:~:text=%D0%95%D0%BB%D0%B5%D0%BA%D1%82%D1%80%D0%B8%CC%81%D1%87%D0%BD%D0%B8%D0%B9%20%D1%81%D0%B8%D0%B3%D0%BD%D0%B0%CC%81%D0%BB%20%E2%80%94%20%D1%81%D0%B8%D0%B3%D0%BD%D0%B0%D0%BB%20%D1%83%20%D0%B2%D0%B8%D0%B3%D0%BB%D1%8F%D0%B4%D1%96,%D1%8F%D0%BA%20%D0%BF%D0%BE%D0%B2%D1%96%D0%B4%D0%BE%D0%BC%D0%BB%D0%B5%D0%BD%D0%BD%D1%8F%20%D1%87%D0%B8%20%D1%8F%D0%BA%20%D1%96%D0%BD%D1%84%D0%BE%D1%80%D0%BC%D0%B0%D1%86%D1%96%D1%8E.]. |
Термін зовнішні впливи широко використовується, тому його необхідно правильно сприймати. Під зовнішнім впливом розуміється кількісна характеристика об'єкта, його властивість чи якість, які необхідно сприйняти і перетворити в електричний сигнал. | Термін зовнішні впливи широко використовується, тому його необхідно правильно сприймати. Під зовнішнім впливом розуміється кількісна характеристика об'єкта, його властивість чи якість, які необхідно сприйняти і перетворити в електричний сигнал. | ||
---- | ---- | ||
| − | '''Робота датчика''' – це особливий випадок передачі інформації, а будь-яка передача інформації пов'язана з передачею енергії | + | '''Робота датчика''' – це особливий випадок передачі інформації, а будь-яка передача інформації пов'язана з передачею енергії[https://uk.wikipedia.org/wiki/%D0%95%D0%BD%D0%B5%D1%80%D0%B3%D1%96%D1%8F]. Очевидним є той факт, що передача енергії може проходити в двох напрямках, тобто вона може бути як позитивною, так і негативною. |
---- | ---- | ||
| − | '''''Датчики Холла''' – це напівпровідникові прилади (пластинки або плівки), електричний потенціал на виході яких їх = Кх/г, нВ є функцією індукції магнітного поля, в яке поміщений датчик. Величина 1х – струм живлення датчика Холла, який визначається умовами включення і вихідний вольт + амперною характеристикою; Кх – чутливість типового датчика при номінальному струмі харчування, 1Хн; В – індукція магнітного поля. Датчик перетворює магнітну індукцію в вихідну напругу.'' | + | '''''Датчики Холла''' – це напівпровідникові[https://uk.wikipedia.org/wiki/%D0%9D%D0%B0%D0%BF%D1%96%D0%B2%D0%BF%D1%80%D0%BE%D0%B2%D1%96%D0%B4%D0%BD%D0%B8%D0%BA] прилади (пластинки або плівки), електричний потенціал на виході яких їх = Кх/г, нВ є функцією індукції магнітного поля, в яке поміщений датчик. Величина 1х – струм живлення датчика Холла, який визначається умовами включення і вихідний вольт + амперною характеристикою; Кх – чутливість типового датчика при номінальному струмі харчування, 1Хн; В – індукція магнітного поля. Датчик перетворює магнітну індукцію в вихідну напругу.'' |
---- | ---- | ||
| + | '''''Герметизовані контакти (геркони)[https://uk.wikipedia.org/wiki/%D0%93%D0%B5%D1%80%D0%BA%D0%BE%D0%BD]'''. Герметизовані магнітокеровані контакти являють собою пластинки з пермаллоя, впаяні в колбу з вакуумом.'' | ||
| + | ---- | ||
| + | '''''Датчики наближення'''- формують сигнал логічної одиниці при попаданні рухомого ланки в зону дії датчика. Форма зони дії може бути різною, але повинна враховувати число ступенів свободи рухомого ланки і їх тип. Датчики наближення можуть застосовуватися як типові, так і вбудовуються в конструкцію.'' | ||
| + | ---- | ||
| + | '''''Потенціо́метр'''[https://uk.wikipedia.org/wiki/%D0%9F%D0%BE%D1%82%D0%B5%D0%BD%D1%86%D1%96%D0%BE%D0%BC%D0%B5%D1%82%D1%80] — змінний резистор із трьома виводами, один із яких рухомий, що використовується, як дільник напруги[https://uk.wikipedia.org/wiki/%D0%9F%D0%BE%D0%B4%D1%96%D0%BB%D1%8C%D0%BD%D0%B8%D0%BA_%D0%BD%D0%B0%D0%BF%D1%80%D1%83%D0%B3%D0%B8]. Електричний струм проходить між кінцевими контактами, а потрібна споживачеві напруга знімається з повзунка, положення якого можна механічно змінювати.'' | ||
| + | ---- | ||
| + | '''Поняття датчик необхідно відрізняти від поняття перетворювач'''. Перетворювач[https://uk.wikipedia.org/wiki/%D0%9F%D0%B5%D1%80%D0%B5%D1%82%D0%B2%D0%BE%D1%80%D1%8E%D0%B2%D0%B0%D1%87#:~:text=%D0%9F%D0%B5%D1%80%D0%B5%D1%82%D0%B2%D0%BE%CC%81%D1%80%D1%8E%D0%B2%D0%B0%D1%87%20%E2%80%94%20%D0%BF%D1%80%D0%B8%D1%81%D1%82%D1%80%D1%96%D0%B9%2C%20%D0%B5%D0%BB%D0%B5%D0%BC%D0%B5%D0%BD%D1%82%20%D0%B5%D0%BB%D0%B5%D0%BA%D1%82%D1%80%D0%B8%D1%87%D0%BD%D0%B8%D1%85%2C,%D0%BD%D0%B0%20%D1%96%D0%BD%D1%88%D0%B8%D0%B9%20%D0%B0%D0%B1%D0%BE%20%D1%81%D0%BF%D1%80%D0%B8%D1%8F%D1%94%20%D1%86%D1%8C%D0%BE%D0%BC%D1%83] конвертує один тип енергії в інший, тоді як датчик перетворює будь-який тип енергії зовнішнього впливу в електричний сигнал. Прикладом перетворювача може служити гучномовець, що конвертує електричний сигнал в змінне магнітне поле для подальшого формування акустичних хвиль. Тут мова не йде ні про яке сприйнятті зовнішньої інформації. (Цікаво відзначити той факт, що якщо гучномовець підключити до входу підсилювача, він буде працювати як мікрофон. У цьому випадку його можна назвати акустичним датчиком.) Перетворювачі можуть виконувати також функції приводів. Привід можна визначити як пристрій, протилежне датчику, оскільки він перетворює електричну енергію, як правило, в неелектричну енергію. Прикладом приводу є електричний мотор, що перетворює електричну енергію в механічну[https://uk.wikipedia.org/wiki/%D0%9C%D0%B5%D1%85%D0%B0%D0%BD%D1%96%D1%87%D0%BD%D0%B0_%D0%B5%D0%BD%D0%B5%D1%80%D0%B3%D1%96%D1%8F]. | ||
| + | На рис. 1 показаний комплекс, що складається з комбінації різних датчиків, приводів і сигналізаторів, застосовуваний у корпорації МББап для підвищення безпеки автомобіля. | ||
| + | ---- | ||
| + | '''''Робота датчика''' – це особливий випадок передачі інформації, а будь-яка передача інформації пов'язана з передачею енергії. Очевидним є той факт, що передача енергії може проходити в двох напрямках, тобто вона може бути як позитивною, так і негативною. Наприклад, енергія може передаватися від об'єкта до датчика, і, навпаки, від датчика до об'єкта. Особливим випадком є ситуація, при якій енергія дорівнює нулю, але і в цьому випадку відбувається передача інформації про існування саме такої особливої ситуації. Інфрачервоний датчик[https://uk.wikipedia.org/wiki/%D0%86%D0%BD%D1%84%D1%80%D0%B0%D1%87%D0%B5%D1%80%D0%B2%D0%BE%D0%BD%D0%B8%D0%B9_%D0%B4%D0%B0%D0%B2%D0%B0%D1%87] температури виробляє позитивну напругу, коли об'єкт тепліше датчика (інфрачервоне випромінювання направлено в сторону датчика), або негативну напругу, коли об'єкт холодніше датчика (інфрачервоне випромінювання направлено від датчика на об'єкт). Коли датчик і об'єкт мають однакову температуру, інфрачервоний потік[https://uk.wikipedia.org/wiki/%D0%86%D0%BD%D1%84%D1%80%D0%B0%D1%87%D0%B5%D1%80%D0%B2%D0%BE%D0%BD%D0%B5_%D0%B2%D0%B8%D0%BF%D1%80%D0%BE%D0%BC%D1%96%D0%BD%D1%8E%D0%B2%D0%B0%D0%BD%D0%BD%D1%8F] дорівнює нулю, і вихідна напруга також дорівнює нулю. У цій ситуації і поміщена інформація про рівність температур датчика і об'єкта.'' | ||
| + | ---- | ||
| + | '''ДЖЕРЕЛА'''<br> | ||
| + | 1. [https://uk.wikipedia.org/wiki/%D0%95%D0%BB%D0%B5%D0%BA%D1%82%D1%80%D0%B8%D1%87%D0%BD%D0%B8%D0%B9_%D1%81%D0%B8%D0%B3%D0%BD%D0%B0%D0%BB#:~:text=%D0%95%D0%BB%D0%B5%D0%BA%D1%82%D1%80%D0%B8%CC%81%D1%87%D0%BD%D0%B8%D0%B9%20%D1%81%D0%B8%D0%B3%D0%BD%D0%B0%CC%81%D0%BB%20%E2%80%94%20%D1%81%D0%B8%D0%B3%D0%BD%D0%B0%D0%BB%20%D1%83%20%D0%B2%D0%B8%D0%B3%D0%BB%D1%8F%D0%B4%D1%96,%D1%8F%D0%BA%20%D0%BF%D0%BE%D0%B2%D1%96%D0%B4%D0%BE%D0%BC%D0%BB%D0%B5%D0%BD%D0%BD%D1%8F%20%D1%87%D0%B8%20%D1%8F%D0%BA%20%D1%96%D0%BD%D1%84%D0%BE%D1%80%D0%BC%D0%B0%D1%86%D1%96%D1%8E Електричний сигнал] | ||
| + | <br /> | ||
| + | 2. [https://uk.wikipedia.org/wiki/%D0%9D%D0%B0%D0%BF%D1%96%D0%B2%D0%BF%D1%80%D0%BE%D0%B2%D1%96%D0%B4%D0%BD%D0%B8%D0%BA Напівпровідник(вікі)] | ||
| + | <br /> | ||
| + | 3. [https://uk.wikipedia.org/wiki/%D0%95%D0%BD%D0%B5%D1%80%D0%B3%D1%96%D1%8F Енергія(вікі)] | ||
| + | <br /> | ||
| + | 4. [https://uk.wikipedia.org/wiki/%D0%93%D0%B5%D1%80%D0%BA%D0%BE%D0%BD Геркони(вікі)] | ||
| + | <br /> | ||
| + | 5. [https://uk.wikipedia.org/wiki/%D0%9F%D0%BE%D1%82%D0%B5%D0%BD%D1%86%D1%96%D0%BE%D0%BC%D0%B5%D1%82%D1%80 Потенціометр(вікі)] | ||
| + | <br /> | ||
| + | 6. [https://uk.wikipedia.org/wiki/%D0%9F%D0%BE%D0%B4%D1%96%D0%BB%D1%8C%D0%BD%D0%B8%D0%BA_%D0%BD%D0%B0%D0%BF%D1%80%D1%83%D0%B3%D0%B8 Дільник напруги(вікі)] | ||
| + | <br /> | ||
| + | 7. [https://uk.wikipedia.org/wiki/%D0%9F%D0%B5%D1%80%D0%B5%D1%82%D0%B2%D0%BE%D1%80%D1%8E%D0%B2%D0%B0%D1%87#:~:text=%D0%9F%D0%B5%D1%80%D0%B5%D1%82%D0%B2%D0%BE%CC%81%D1%80%D1%8E%D0%B2%D0%B0%D1%87%20%E2%80%94%20%D0%BF%D1%80%D0%B8%D1%81%D1%82%D1%80%D1%96%D0%B9%2C%20%D0%B5%D0%BB%D0%B5%D0%BC%D0%B5%D0%BD%D1%82%20%D0%B5%D0%BB%D0%B5%D0%BA%D1%82%D1%80%D0%B8%D1%87%D0%BD%D0%B8%D1%85%2C,%D0%BD%D0%B0%20%D1%96%D0%BD%D1%88%D0%B8%D0%B9%20%D0%B0%D0%B1%D0%BE%20%D1%81%D0%BF%D1%80%D0%B8%D1%8F%D1%94%20%D1%86%D1%8C%D0%BE%D0%BC%D1%83 Перетворювач(вікі)] | ||
| + | <br /> | ||
| + | 8. [https://uk.wikipedia.org/wiki/%D0%9C%D0%B5%D1%85%D0%B0%D0%BD%D1%96%D1%87%D0%BD%D0%B0_%D0%B5%D0%BD%D0%B5%D1%80%D0%B3%D1%96%D1%8F Механічна енергія(вікі)] | ||
| + | <br /> | ||
| + | 9. [https://uk.wikipedia.org/wiki/%D0%86%D0%BD%D1%84%D1%80%D0%B0%D1%87%D0%B5%D1%80%D0%B2%D0%BE%D0%BD%D0%B8%D0%B9_%D0%B4%D0%B0%D0%B2%D0%B0%D1%87 Інфрачервоний давач(вікі)] | ||
| + | <br /> | ||
| + | 10. [https://uk.wikipedia.org/wiki/%D0%86%D0%BD%D1%84%D1%80%D0%B0%D1%87%D0%B5%D1%80%D0%B2%D0%BE%D0%BD%D0%B5_%D0%B2%D0%B8%D0%BF%D1%80%D0%BE%D0%BC%D1%96%D0%BD%D1%8E%D0%B2%D0%B0%D0%BD%D0%BD%D1%8F Інфрачервоне випромінювання(вікі)] | ||
Версія за 01:53, 10 березня 2023
Зміст
Датчик
Датчик – це пристрій, що сприймає зовнішні впливи і реагує на них зміною електричних сигналів. Термін зовнішні впливи широко використовується, тому його необхідно правильно сприймати. Під зовнішнім впливом розуміється кількісна характеристика об'єкта, його властивість чи якість, які необхідно сприйняти і перетворити в електричний сигнал.
Вимірювана величина – це термін, що має аналогічне значення, проте в цьому терміні робиться акцент на кількісній характеристиці сенсорної функції. Призначення датчиків – реакція на певну зовнішню фізичного впливу і перетворення його в електричний сигнал, сумісний з вимірювальними схемами. Іншими словами, можна сказати, що датчик – це перетворювач фізичної величини (часто неелектричної) в електричний сигнал. Під терміном електричний сигнал розуміється сигнал, який може бути перетворений за допомогою електронних пристроїв, наприклад, посилено або переданий по лінії передач. Вихідними сигналами датчиків можуть бути напруга, струм або заряд, які описуються наступними характеристиками: амплітудою, частотою, фазою або цифровим кодом. Цей набір характеристик називається форматом вихідного сигналу. Таким чином, кожен датчик характеризується набором вхідних параметрів (будь-якої фізичної природи) і набором вихідних електричних параметрів. Будь який датчик є перетворювачем енергії. Незалежно від типу вимірюваної величини завжди відбувається передача енергії від досліджуваного об'єкта до датчика.
Робота датчика – це особливий випадок передачі інформації, а будь-яка передача інформації пов'язана з передачею енергії. Очевидним є той факт, що передача енергії може проходити в двох напрямках, тобто вона може бути як позитивною, так і негативною. Наприклад, енергія може передаватися від об'єкта до датчика, і, навпаки, від датчика до об'єкта. Особливим випадком є ситуація, при якій енергія дорівнює нулю, але і в цьому випадку відбувається передача інформації про існування саме такої особливої ситуації. Інфрачервоний датчик температури виробляє позитивну напругу, коли об'єкт тепліше датчика (інфрачервоне випромінювання направлено в сторону датчика), або негативну напругу, коли об'єкт холодніше датчика (інфрачервоне випромінювання направлено від датчика на об'єкт). Коли датчик і об'єкт мають однакову температуру, інфрачервоний потік дорівнює нулю, і вихідна напруга також дорівнює нулю. У цій ситуації і поміщена інформація про рівність температур датчика і об'єкта.
Поняття датчик необхідно відрізняти від поняття перетворювач. Перетворювач конвертує один тип енергії в інший, тоді як датчик перетворює будь-який тип енергії зовнішнього впливу в електричний сигнал. Прикладом перетворювача може служити гучномовець, що конвертує електричний сигнал в змінне магнітне поле для подальшого формування акустичних хвиль. Тут мова не йде ні про яке сприйнятті зовнішньої інформації. (Цікаво відзначити той факт, що якщо гучномовець підключити до входу підсилювача, він буде працювати як мікрофон. У цьому випадку його можна назвати акустичним датчиком.) Перетворювачі можуть виконувати також функції приводів. Привід можна визначити як пристрій, протилежне датчику, оскільки він перетворює електричну енергію, як правило, в неелектричну енергію. Прикладом приводу є електричний мотор, що перетворює електричну енергію в механічну. На рис. 1 показаний комплекс, що складається з комбінації різних датчиків, приводів і сигналізаторів, застосовуваний у корпорації МББап для підвищення безпеки автомобіля.

Рис. 1 Система безпеки автомобіля (з дозволу Nissan Motor Company)
До його складу входять дві системи, що борються із засипанням водія за кермом автомобіля. Дія однієї з цих систем спрямоване на попередження водія, а інший – на вирівнювання курсу автомобіля. Для виконання цих функцій необхідні спеціальні датчики, роль яких можуть грати сенсори стеження за очним яблуком водія і детектори нахилу його голови. У систему видачі сигналу необхідності екстреного гальмування, побудовану на основі датчиків мікрохвильового, ультразвукового і інфрачервоного діапазонів, часто входить пристрій випереджаючого включення індикаторів гальмування, що дозволяє заздалегідь попередити про небезпеку водіїв транспортних засобів, що їдуть позаду. До складу системи попередження про перешкоди входять інфрачервоні детектори та радар. Адаптивна система круїз-контролю починає працювати в момент, коли водій занадто наблизився до попереду йде транспортному засобу: при цьому швидкість автомобіля негайно знижується для забезпечення безпечної дистанції. Пристрій моніторингу пішоходів визначає присутність людей на дорозі в темний час доби і в зонах, закритих для огляду, і попереджає про це водія автомобіля. Система контролю смуги руху визначає ситуації, при яких відхилення автомобіля відбувається не з волі водія. При цьому система оповіщає водія про відхід зі смуги і автоматично вирівнює транспортний засіб.
Для того щоб віднести датчик до тієї чи іншої групи необхідно знати: які величини він може вимірювати, його характеристики, на якому фізичному принципі він реалізований, який механізм перетворень він застосовує, з якого матеріалу він виготовлений, яка область його застосування. У таблицях 1.1-1.6 представлена схема такої класифікації, яка є найбільш інформативною. Для прикладу розглянемо акселерометр на поверхневих акустичних хвилях (ПАР). Згідно з наведеними таблицями 1.1–1.7 йому можна дати наступне опис.
Таблиця 1.1
| Властивість | Характеристика |
|---|---|
| Зовнішній вплив | Прискорення |
| Характеристики | Чутливість визначається як відношення зміни частоти на одиницю прискорення,
короткострокова і довгострокова стабільність і вимірюється в Гц на одиницю часу і т.д. |
| Фізичний принцип | Механічний |
| Механізм перетворень | Пружноелектричний |
| Матеріал | Неорганічний діелектрик |
| Область застосування | Морський і автомобільний транспорт,космічні дослідження, наукові вимірювання |
Таблиця 1.2
| Характеристики | |
|---|---|
| Чутливість | Діапазон вхідних значень |
| Точність | Зовнішні умови |
| Швидкодія | Лінійність |
| Характеристики при перевантаженні | Мертва зона |
| Гістерезис | Формат вихідного сигналу |
| Експлуатаційний ресурс | Інші |
| Вартість, розміри, вага |
Таблиця 1.3
| Матеріали | датчиків |
|---|---|
| Неорганічні | Органічні |
| Провідники | Діелектрики |
| Напівпровідники | Рідини, гази, плазма |
| Біологічні тканини | Інші |
Таблиця 1.4
| Засоби детектування |
|---|
| Біологічні |
| Хімічні |
| Електричні, магнітні або електромагнітні хвилі |
| Тепло, температура |
| Механічне переміщення або хвиля |
| Радіоактивність, випромінювання |
| Інші |
Таблиця 1.5
| Механізм | перетворень |
|---|---|
| Фізичні | Хімічні |
| Термоелектрика | Хімічні перетворення |
| Фотоелектрика | Фізичні перетворення |
| Фотомагнетизм | Електрохімічний процес |
| Магнітоелектрика | Спектроскопія |
| Електромагнетизм | Інше |
| Термопружність | Біологічні |
| Електропружність | Біохімічні перетворення |
| Термомагнетизм | Фізичні перетворення |
| Термооптика | Вплив на тестовані організми |
| Фотопружність | Спектроскопія |
| Інше | Інші |
Таблиця 1.6
| Області | застосування |
|---|---|
| Архітектура | Цивільне будівництво, проектування |
| Розподіл, торгівля, фінанси | Відпочинок, розваги |
| Енергетика | Засоби інформації, телекомунікація |
| Охорона здоров'я, медицина | Домашнє застосування |
| Оборонна промисловість | Навколишнє середовище, метеорологія, засоби безпеки |
| Наукові дослідження | Космос |
| Транспорт (виключаючи автомобільний) | Судноплавство |
| Автомобільний транспорт | Інше |
Таблиця 1.7
| Зовнішній | вплив |
|---|---|
| Електричне поле (амплітуда, фаза, поляризація, спектр) | Амплітуда хвилі, фаза, поляризація |
| Магнітний потік | Магнітне поле (амплітуда, фаза, поляризація, спектр) |
| Елементи (ідентичність, концентрація, стан) | Швидкість хвилі |
| Діелектрична проникність | Проникність |
| Біологічний | Біомаса(вид, концентрація, стан) |
| Оптичний | В'язкість |
| Електричний | Заряд, струм |
| Потенціал, напруга | Спектр |
| Акустичний | Магнітний |
| Хімічний | Провідність |
Класи датчиків
– аналогові датчики, тобто датчики, що виробляють аналоговий сигнал;
– цифрові датчики, що генерують послідовність імпульсів або двійкове слово;
– бінарні (двійні) датчики, які виробляють сигнал тільки двох рівнів: "включено/вимкнено" (інакше кажучи, 0 або 1). Динамічні властивості датчика характеризуються цілим рядом параметрів, які досить рідко наводяться в технічних описах виробників. Динамічну характеристику датчика можна експериментально отримати як реакцію на стрибок вимірюваної вхідної величини (рис. 1.1). Параметри, що описують реакцію датчика, дають уявлення про його швидкості (наприклад, час наростання, запізнювання, час досягнення першого максимуму), інерційних властивостях (відносне перерегулювання, час встановлення) і точності (зсув).

Рис. 1.1 – Динамічна реакція датчика (реакція на стрибок): Т0 – час проходження зони нечутливості, Тd – запізнювання, Тр – час досягнення першого максимуму, Тs – час встановлення, Мр – перерегулювання.
Параметри:
- Час проходження зони нечутливості (dead time) – час між початком зміни фізичної величини і моментом реакції датчика, тобто моментом початку зміни вихідного сигналу.
- Запізнення (delay time) – час, через який показання датчика перший раз досягають 50 % сталого значення. У літературі зустрічаються й інші визначення запізнювання.
- Час наростання (rise time) – час, за який вихідний сигнал збільшується від 10 до 90 % сталого значення. Інше визначення часу наростання – величина, зворотна нахилу кривої реакції датчика на стрибок вимірюваної величини в момент досягнення 50 % від сталого значення, помножене на стале значення. Іноді використовуються інші визначення. Малий час наростання завжди вказує на швидку реакцію.
- Час досягнення першого максимуму (peak rime) – час досягнення першого максимуму вихідного сигналу (перерегулирования).
- Час перехідного процесу, час встановлення (settling time) – час, починаючи з якого відхилення виходу датчика від сталого значення стає менше заданої величини (наприклад, ± 5 %).
- Відносне перерегулювання (percentage overshoot) – різниця між максимальним і сталим значеннями, віднесена до сталому значенню (у відсотках).
- Статична помилка (steadystate error) – відхилення вихідної величини датчика від істинного значення або зсув. Може бути усунена калібруванням датчика.
У реальних умовах деякі вимоги до датчиків завжди суперечать один одному, тому всі параметри не можна мінімізувати одночасно.
Статичні характеристики датчика
Вони показують, наскільки коректно вихід датчика відображає вимірювану величину через деякий час після її зміни, коли вихідний сигнал встановився на нове значення. Важливими статичними параметрами є: чутливість, роздільна здатність або дозвіл, лінійність, дрейф нуля і повний дрейф, робочий діапазон, повторюваність і відтворюваність результату.
- Чутливість (sensitivity) датчика визначається як відношення величини вихідного сигналу до одиничної вхідний величиною (для тонких вимірювальних технологій визначення чутливості може бути більш складним).
- Дозвіл (resolution) – це найменша зміна вимірюваної величини, яке може бути зафіксовано і точно показано датчиком.
- Лінійність (linearity) не описується аналітично, а визначається виходячи з градуировочной кривої датчика. Статична градуировочна крива показує залежність вихідного сигналу від вхідного при стаціонарних умовах. Близькість цієї кривої до прямої лінії і визначає ступінь лінійності. Максимальне відхилення від лінійної залежності виражається у відсотках.
- Статичне посилення (static gain) або посилення по постійному струму (dc gain) – це коефіцієнт посилення датчика на дуже низьких частотах. Великий коефіцієнт посилення відповідає високої чутливості вимірювального пристрою.
- Дрейф (drift) визначається як відхилення показань датчика, коли вимірювана величина залишається постійною протягом тривалого часу. Величина дрейфу може визначатися при нульовому, максимальному або деякому проміжному значенні вхідного сигналу. При перевірці дрейфу нуля вимірювана величина витримується на нульовому рівні або рівні, який відповідає нульовому вихідному сигналу, а перевірка дрейфу на максимумі виконується при значенні вимірюваної величини, відповідному верхньої межі робочого діапазону датчика. Дрейф датчика викликається нестабільністю підсилювача, зміною навколишніх умов (наприклад, температури, тиску, вологості або рівня вібрацій), параметрів електропостачання або самого датчика (старіння, вироблення ресурсу, нелінійність і т.д.).
Робочий діапазон (operating range) датчика визначається допустимими верхнім і нижнім межами значення вхідної величини або рівня вихідного сигналу.
- Повторюваність (repeatability) характеризується як відхилення між кількома послідовними вимірами при заданому значенні вимірюваної величини в однакових умовах, зокрема наближення до заданого значення має відбуватися завжди і або як наростання, або як спадання. Вимірювання повинно бути виконані за такий проміжок часу, щоб не виявлявся вплив дрейфу. Повторюваність зазвичай виражається у відсотках від робочого діапазону.
- Відтворюваність (reproducibility) аналогічна повторюваності, але вимагає більшого інтервалу між вимірами. Між перевірками на відтворюваність датчик повинен використовуватися за призначенням і, більше того, може бути підданий калібрування. Відтворюваність задається у вигляді відсотків від робочого діапазону, віднесених до одиниці часу (наприклад, місяця).
Види датчиків
Датчики кінцевих і проміжних положень (ДКП) переміщається об'єкта (вихідного механічного ланки ВМЗ) відносяться до датчиків положення і фіксують його бінарне стан «знаходиться / чи не знаходиться в даній точці простору». Такі датчики є невід'ємною частиною, наприклад, роботів з циклових управлінням. Первинними перетворювачами ДКП найчастіше виступають елементи прямого електричного контакту, мікровимикачі, геркони, оптопари з відкритим оптичним каналом, індуктивні датчики, ємнісні датчики, датчики Холла і т. п. При організації взаємодії датчика з ВМЗ часто використовують механізми включення, приклад одного з них показаний на рис. 1.2

Рис. 1.2 Механізм включення ДКП
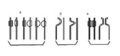
Рис. 1.3 Типи контактів: а) точкові; б) лінійні; в) площині


ДКП на основі елементів прямого електричного контакту. Такі датчики складаються з двох контактних елементів, виконаних з металів з високою провідністю і хорошою захищеністю контакту від окислення.
Один елемент встановлюється на рухомому об'єкті, другий - на іншому рухомому або нерухомому об'єкті. При збігу встановленого положення об'єктів контакти замикаються. Для надійності замикання контакти встановлюють на пружних елементах, які забезпечують необхідну силу підтискання контактів. При проектуванні датчиків прямого електричного контакту можна починати з вибору конструкції і матеріалів контактів.
Точкові контакти (рис. 1.3 а ) застосовують при малій потужності навантаження, приєднуючи плоский контакт до негативного полюса джерела живлення. Лінійні і площинні контакти (рис. 1.3 б,в ) застосовують для комутації потужних сигналів. Вимоги до матеріалу контактів: висока твердість і механічна міцність, стійкість до окислення, висока температура плавлення і випаровування, висока тепло + і електропровідність. Найбільш вживані матеріали: мідь, срібло, платино + іридієві сплави, вольфрам, платино + срібні сплави, срібло в сплаві з окисом кадмію.
Геркони
Герметизовані контакти (геркони). Герметизовані магнітокеровані контакти являють собою пластинки з пермаллоя, впаяні в колбу з вакуумом (див. рис. 1.4).

Рис. 1.4 Геркони
Позначки:
а – замикає з нормально розімкненим контактом;
б – нейтральний з двома нормально розімкнутими контактами;
в – переключаючий з нормально замкнутим і нормально розімкненим контактами;
г – схема впливу поля постійного магніту з контактами;
д – схема визначення кутового положення диска;
е – схема визначення кінцевого положення штока: 1 – магніт; 2 – геркон; ж – схема розміщення геркона і магніту з максимальним використанням магнітного потоку магніту
У відсутність магнітного поля пластинки розімкнуті/замкнуті, при появі магнітного поля вони замикаються/розмикаються. Контактують кінці пластинок покривають золотом, сріблом, родієм, змочують ртуттю. Магнітне поле створюється постійним магнітом або електромагнітом. Таке конструктивне рішення забезпечує високу надійність комутації в будь-якому середовищі; кількість комутацій до 109; високу швидкодію, вібростійкість, радіаційну стійкість; невелику вартість геркона; хорошу технологічність монтажу. Зазвичай геркон встановлюють на нерухомому об'єкті, а маленький постійний магніт – на рухомому. Геркон і магніт можна встановити на посадці з натягом або приклеїти.
Датчики Холла
Датчики Холла – це напівпровідникові прилади (пластинки або плівки), електричний потенціал на виході яких їх = Кх/г, нВ є функцією індукції магнітного поля, в яке поміщений датчик. Величина 1х – струм живлення датчика Холла, який визначається умовами включення і вихідний вольт + амперною характеристикою; Кх – чутливість типового датчика при номінальному струмі харчування, 1Хн; В – індукція магнітного поля. Датчик перетворює магнітну індукцію в вихідну напругу.
Область застосування: в якості первинного вимірювального перетворювача в приладах для виміру магнітної індукції і в пристроях для вимірювання лінійних і кутових переміщень. Датчики Холла випускаються у вигляді мікросхем в прямокутному пластмасовому корпусі, який при монтажі може приклеюватися. Приклад датчика Холла(ДХК-0,5А: а) загальний вигляд; б) схема включення) показаний на рис. 1.5
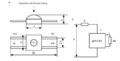
Рис. 1.5

Датчики наближення
Вони формують сигнал логічної одиниці при попаданні рухомого ланки в зону дії датчика. Форма зони дії може бути різною, але повинна враховувати число ступенів свободи рухомого ланки і їх тип. Датчики наближення можуть застосовуватися як типові, так і вбудовуються в конструкцію.
1. Індуктивні датчики наближення – твердотільні датчики, що не включають до свого складу труться механічних частин. Вони працюють на високій частоті магнітного поля для виявлення перешкоди з феромагнетика або кольорового металу на відстані від одиниць до десятків мм Підключення до цифрового контролера виконується ланцюжком перетворювачів «міст Уінстона (детектор) – фільтр низьких частот – підсилювач (якщо потрібно) – компаратор – порт введення бінарних сигналів» при детектуванні точки в зоні або «міст Уінстона (детектор) – фільтр низьких частот – підсилювач (якщо потрібно) – АЦП »при детектуванні зони.
2. Ємнісні датчики визначають перепони з електрично проводять, непровідних матеріалів, паперу, порошків, рідин і т. д. Датчик спрацьовує при наближенні до об'єкту в зоні від одиниць до десятків міліметрів. Датчик має активну поверхню, що складається з двох електрично ізольованих частин, що складають електричну ємність (відкритий конденсатор). При попаданні тіл в поле дії цього конденсатора його ємність змінюється, і формується сигнал логічної одиниці.
3. Фотоелектричні датчики наближення працюють на принципі зміни одержуваної світлової енергії. Випромінюється потік світлової енергії переривається або відбивається наближаються предметами. Залежно від типу датчика використовується переривання світлового потоку, його відображення чи розсіювання. Перешкоди залежно від якості їх поверхонь і типу датчика виявляються на відстані від десятків до сотень міліметрів. Для підвищення надійності Оптодатчики застосовують інфрачервоні світлові потоки та / або їх модуляцію, поляризоване світло. Підключення ДКП на основі фотоприймача до цифрового контролера виконується ланцюжком перетворювачів «фотоприймач – підтягуючий резистор (якщо потрібно) або підсилювач потужності (якщо потрібно) – компаратор – порт введення бінарних сигналів» при детектуванні точки в зоні або «фотоприймач – підтягуючий резистор (якщо потрібно) або підсилювач потужності (якщо потрібно) – підсилювач (якщо потрібно) – АЦП» при детектуванні зони.
4. Ультразвукові датчики наближення складаються з передавача і приймача. Передавач посилає ультразвуковий промінь, а приймач приймає прямий або відбитий промінь. Ослаблення потужності звукового променя свідчить про наявність перешкоди. При появі перешкоди відбувається спрацьовування датчика. Ультразвукові датчики мають зону спрацювання, залежну тільки від потужності випромінювача і чутливості приймача, яка може досягати одиниць метрів. Ультразвукові датчики підключаються до цифрового контролера за рекомендаціями виробника.
Потенціометричні датчики переміщень
Розрізняють потенціометричні датчики лінійних і кутових переміщень. Застосовують кілька схем включення потенціометрів (рис. 1.7). За типом матеріалу і конструкції розрізняють мастичні, плівкові і дротяні потенціометри.
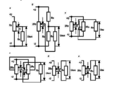
Рис. 1.7. Схеми включення потенціометрів

Позначки на схемах:
а) типове;
б) мостове з постійними резисторами;
в) мостове з двома постійними резисторами;
г) мостове з двома постійними резисторами, з додатковими виходами;
д) для потенціометра з додатковим середнім виходом;
е) типове для потенціометра з двома зв’язаними повзунками
Потенціометри як елементи мають багато недоліків: обмежену шкалу, низьку роздільну здатність, великий простір, залежність від стабільності харчування, помилку послідовності, істотне зусилля рушання і тертя, але є області застосування потенціометрів, де недорогий альтернативи для них немає, наприклад, в умовах радіоактивності.
Глосарій
Датчик – це пристрій, що сприймає зовнішні впливи і реагує на них зміною електричних сигналів[1]. Термін зовнішні впливи широко використовується, тому його необхідно правильно сприймати. Під зовнішнім впливом розуміється кількісна характеристика об'єкта, його властивість чи якість, які необхідно сприйняти і перетворити в електричний сигнал.
Робота датчика – це особливий випадок передачі інформації, а будь-яка передача інформації пов'язана з передачею енергії[2]. Очевидним є той факт, що передача енергії може проходити в двох напрямках, тобто вона може бути як позитивною, так і негативною.
Датчики Холла – це напівпровідникові[3] прилади (пластинки або плівки), електричний потенціал на виході яких їх = Кх/г, нВ є функцією індукції магнітного поля, в яке поміщений датчик. Величина 1х – струм живлення датчика Холла, який визначається умовами включення і вихідний вольт + амперною характеристикою; Кх – чутливість типового датчика при номінальному струмі харчування, 1Хн; В – індукція магнітного поля. Датчик перетворює магнітну індукцію в вихідну напругу.
Герметизовані контакти (геркони)[4]. Герметизовані магнітокеровані контакти являють собою пластинки з пермаллоя, впаяні в колбу з вакуумом.
Датчики наближення- формують сигнал логічної одиниці при попаданні рухомого ланки в зону дії датчика. Форма зони дії може бути різною, але повинна враховувати число ступенів свободи рухомого ланки і їх тип. Датчики наближення можуть застосовуватися як типові, так і вбудовуються в конструкцію.
Потенціо́метр[5] — змінний резистор із трьома виводами, один із яких рухомий, що використовується, як дільник напруги[6]. Електричний струм проходить між кінцевими контактами, а потрібна споживачеві напруга знімається з повзунка, положення якого можна механічно змінювати.
Поняття датчик необхідно відрізняти від поняття перетворювач. Перетворювач[7] конвертує один тип енергії в інший, тоді як датчик перетворює будь-який тип енергії зовнішнього впливу в електричний сигнал. Прикладом перетворювача може служити гучномовець, що конвертує електричний сигнал в змінне магнітне поле для подальшого формування акустичних хвиль. Тут мова не йде ні про яке сприйнятті зовнішньої інформації. (Цікаво відзначити той факт, що якщо гучномовець підключити до входу підсилювача, він буде працювати як мікрофон. У цьому випадку його можна назвати акустичним датчиком.) Перетворювачі можуть виконувати також функції приводів. Привід можна визначити як пристрій, протилежне датчику, оскільки він перетворює електричну енергію, як правило, в неелектричну енергію. Прикладом приводу є електричний мотор, що перетворює електричну енергію в механічну[8]. На рис. 1 показаний комплекс, що складається з комбінації різних датчиків, приводів і сигналізаторів, застосовуваний у корпорації МББап для підвищення безпеки автомобіля.
Робота датчика – це особливий випадок передачі інформації, а будь-яка передача інформації пов'язана з передачею енергії. Очевидним є той факт, що передача енергії може проходити в двох напрямках, тобто вона може бути як позитивною, так і негативною. Наприклад, енергія може передаватися від об'єкта до датчика, і, навпаки, від датчика до об'єкта. Особливим випадком є ситуація, при якій енергія дорівнює нулю, але і в цьому випадку відбувається передача інформації про існування саме такої особливої ситуації. Інфрачервоний датчик[9] температури виробляє позитивну напругу, коли об'єкт тепліше датчика (інфрачервоне випромінювання направлено в сторону датчика), або негативну напругу, коли об'єкт холодніше датчика (інфрачервоне випромінювання направлено від датчика на об'єкт). Коли датчик і об'єкт мають однакову температуру, інфрачервоний потік[10] дорівнює нулю, і вихідна напруга також дорівнює нулю. У цій ситуації і поміщена інформація про рівність температур датчика і об'єкта.
ДЖЕРЕЛА
1. Електричний сигнал
2. Напівпровідник(вікі)
3. Енергія(вікі)
4. Геркони(вікі)
5. Потенціометр(вікі)
6. Дільник напруги(вікі)
7. Перетворювач(вікі)
8. Механічна енергія(вікі)
9. Інфрачервоний давач(вікі)
10. Інфрачервоне випромінювання(вікі)
